授業にも探求型学習にも活用できる学習教材

サーボモーター

目次
使い方
- 回転させたい(方向や向きを決めたい)
- 位置を決めたい、場所を決めたい
回転するタイプと位置を決めるタイプの2種類ある。
回転するタイプはプログラムで回転の向きやスピードを変えることができる。車のタイヤのようなイメージ。
位置を決めるタイプはプログラムで止める位置を決めることができる。車のワイパーのようなイメージ。
プログラミング例
具体例
- サーボモーターをP1/P15端子につなげます。
つなげるときは、専用のケーブルが必要です。
P1/P15端子には最大2個のサーボモーターをつなげることができます。
P2端子、P16端子には1個のサーボモータをつなげることができます。
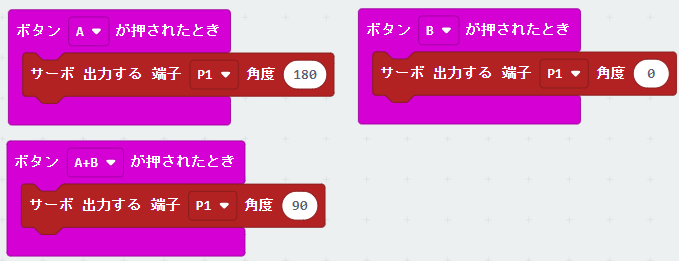
ここではP1端子を使って説明します。 - 「入力」から「ボタン●が押されたとき」を3つ取り出します。
- ボタンA、ボタンB、ボタンA+Bの3種類を作ります。
- 「高度なブロック」の「入出力端子」から、「サーボ 出力する 端子● 角度●」のブロックを取り出します。
- 「端子▼」の部分をクリックしP1に変更します。
- 角度は0~180で設定できます。
回転タイプのサーボモーターの場合、0…逆回転、90…停止、180…順回転 で動きます。
間の数字を設定すると、スピードが変わります。
位置タイプのサーボモーターの場合、0…左、90…真ん中、180…右 の位置で止まります。
間の数字を設定すると、途中の位置で止まります。
操作例
Aを押すとサーボモーターが回転します。Bを押すと逆回転します。A+Bを押すと停止します。